İtaliyada uçma imkanına sahib insanabənzər robot sınaqdan keçirilib (VİDEO)
Elm & Texnologiya
20.06.2025
Emil
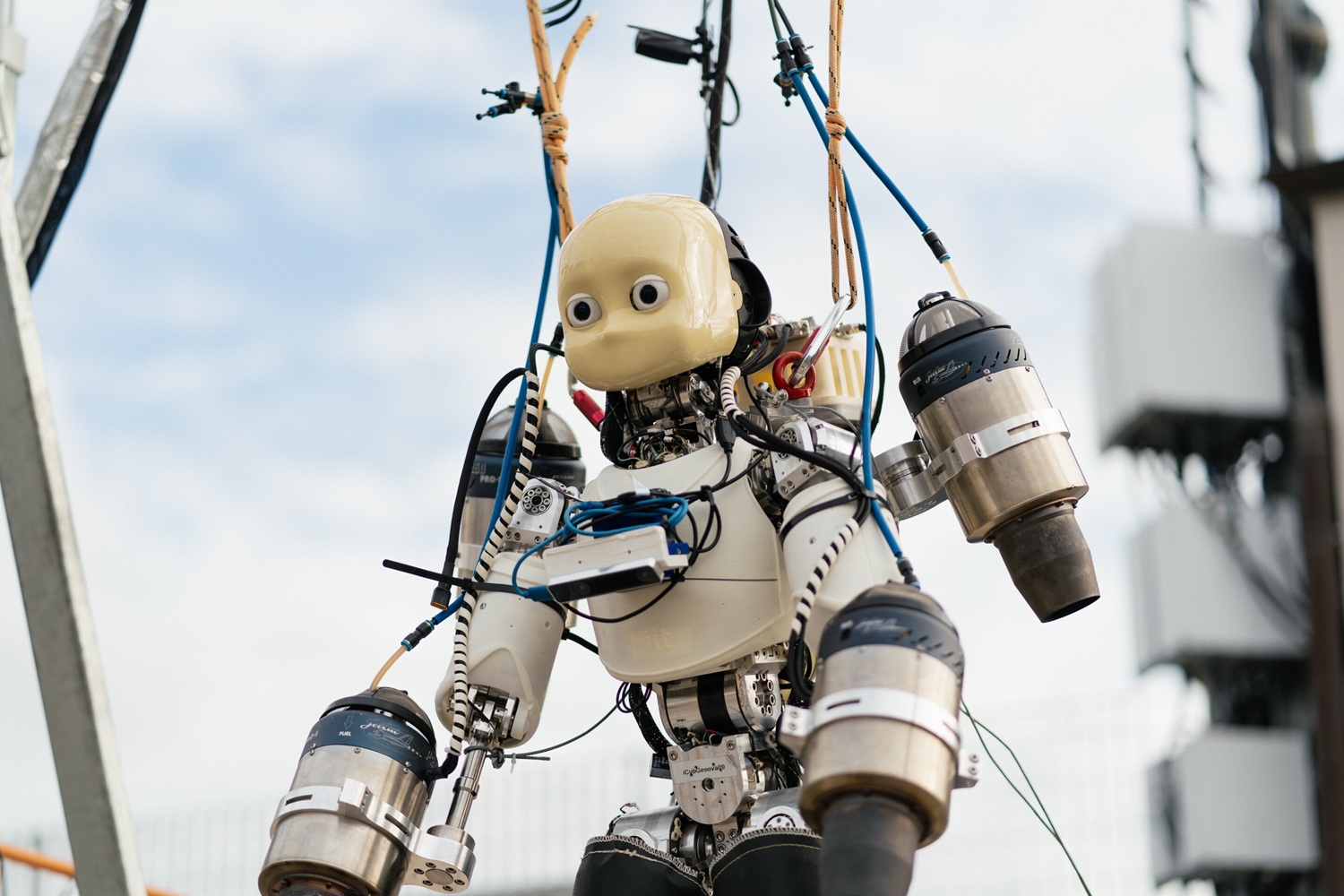
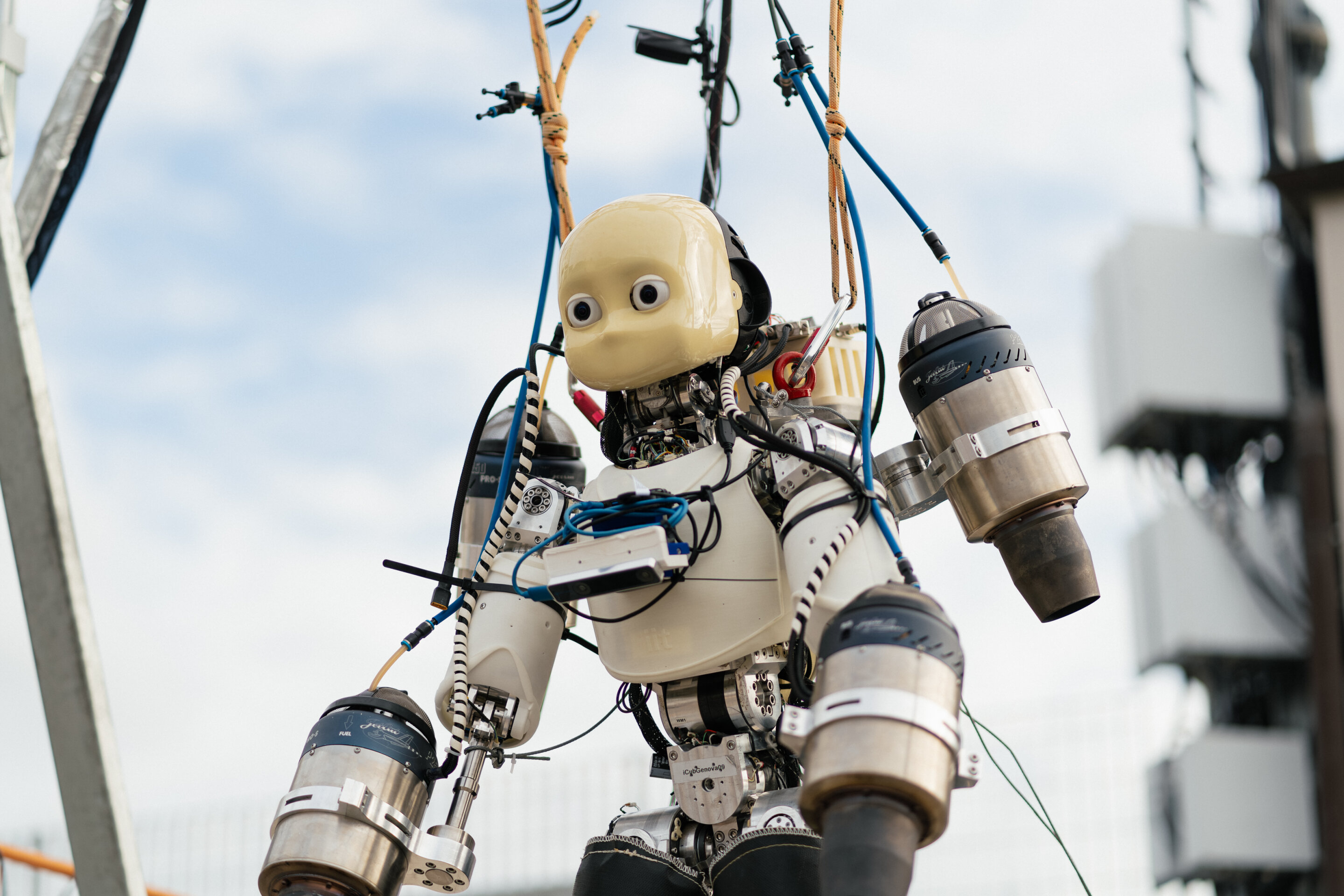
İtaliyalı alimlər ilk dəfə reaktiv humanoid (insanabənzər) robot - iRonCub3-ü havaya qaldırıblar. Sınaqlar zamanı robot təxminən 50 sm yüksəkliyə qalxaraq havada tarazlığını inamla qoruyub saxlayıb. Çəkisi 70 kq olan bu robot 4 mini-turbinlə təchiz olunub və üçüncü nəsil iCub android bazasında hazırlanıb. O, süni zəka sistemləri və yeni idarəetmə alqoritmləri sayəsində hava axınlarına uyğunlaşa və bədən mövqeyini dəyişə bilir. Gələcəkdə belə uçan humanoid robotlar axtarış-xilasetmə əməliyyatlarında, mürəkkəb mühəndis missiyalarında və insan üçün təhlükəli olan zonalarda istifadə oluna bilər. iRonCub3 - iCub robotunun üçüncü nəsli əsasında hazırlanmış, distant idarə olunan bir robotdur. O, 4 reaktiv mühərriklə təchiz olunub: 2-si qollarda, digər 2-si isə arxa çantaya bənzər qurğuda yerləşir. Bu konstruksiya ona havada asılı qalmağa və güclü külək və ya xarici təsirlər zamanı belə sabit qalmağa imkan verir.
Robotun çəkisi 70 kq-dır və 1000 Nyutondan çox itələmə gücü yarada bilir. Turbinlər 800 dərəcə Selsi temperaturda qaz tullantısı buraxdığı üçün iRonCub3 üçün yeni titan “onurğa” və xüsusi istiliyədavamlı örtüklər hazırlanmalı olub. Komanda iRonCub3-ün yaradılması və sınaqdan keçirilməsi üçün 2 il vaxt sərf edib. Əsas problem robotun uçuş zamanı sabitliyinin təmin olunması olub. Adi dronlardan fərqli olaraq, iRonCub3 simmetrik və kompakt deyil - onun hərəkətli ətrafları və uzunsov gövdəsi var. Bu səbəbdən onun aerodinamikası daim dəyişir və kütlə mərkəzi qeyri-sabit qalır. Bu problemi həll etmək üçün alimlər real vaxtda aerodinamik qiymətləndirmə və yeni uçuş idarəetmə modelləri hazırlayıblar.
Layihə çərçivəsində İtaliya Texnologiya İnstitutunun komandası aerodinamik boru sınaqları üçün Milan Politexnik İnstitutu, machine learning metodlarının tətbiqi üçün isə Stenford Universiteti ilə əməkdaşlıq edib. iRonCub3-ün sabit uçuşunu təmin etmək üçün həm modelləşdirilmiş, həm də real təcrübi məlumatlar əsasında təlim keçmiş neyron şəbəkələrdən istifadə olunub. Bu sistemlər robotun idarəetməsinə inteqrasiya edilib və ona uçuş zamanı hava turbulentliyinə və ətraflarının mövqeyindəki dəyişikliklərə birbaşa reaksiya verməyə imkan yaradır. Süni zəkanın sayəsində iRonCub3 mühərriklərin ardıcıl işə salınması və ya gövdənin qalxış zamanı hərəkəti kimi kəskin keçidlərin öhdəsindən asanlıqla gəlir.

Çoxsaylı simulyasiyalar və sınaqlar robotun sistemlərinin, o cümlədən itələmə sensorları, istilik tənzimləmə sistemi və avtomatik qalxma-enmə planlayıcılarının təkmilləşdirilməsinə imkan verib. iRonCub3-ün ilk sınaqları İtaliya Texnologiya İnstitutunun qapalı laboratoriyasında həyata keçirilib və sınaqlar zamanı robotun havada asılı vəziyyətdə qalması müşahidə olunub. Gələcəkdə bu sınaqlar Genuya hava limanında yerləşən ixtisaslaşmış uçuş meydançasına köçürüləcək. Gözlənilir ki, iRonCub3 kimi uçan humanoid robotlar təbii fəlakət bölgələrində, çirklənmiş mühitlərdə və ya həm uçuş, həm də dəqiq manipulyasiyalar tələb edən missiyalarda istifadə ediləcək.
Mənbə: Interesting Engineering
Paylaş